Hello, my name is Christoper Choi. I am a PhD student at the Smart Robotics Lab supervised by Dr. Stefan Leutenegger at Imperial College London. My current research focus is on SLAM for micro-aerial vehicles.
Hello, my name is Christoper Choi. I am a PhD student at the Smart Robotics Lab supervised by Dr. Stefan Leutenegger at Imperial College London. My current research focus is on SLAM for micro-aerial vehicles.

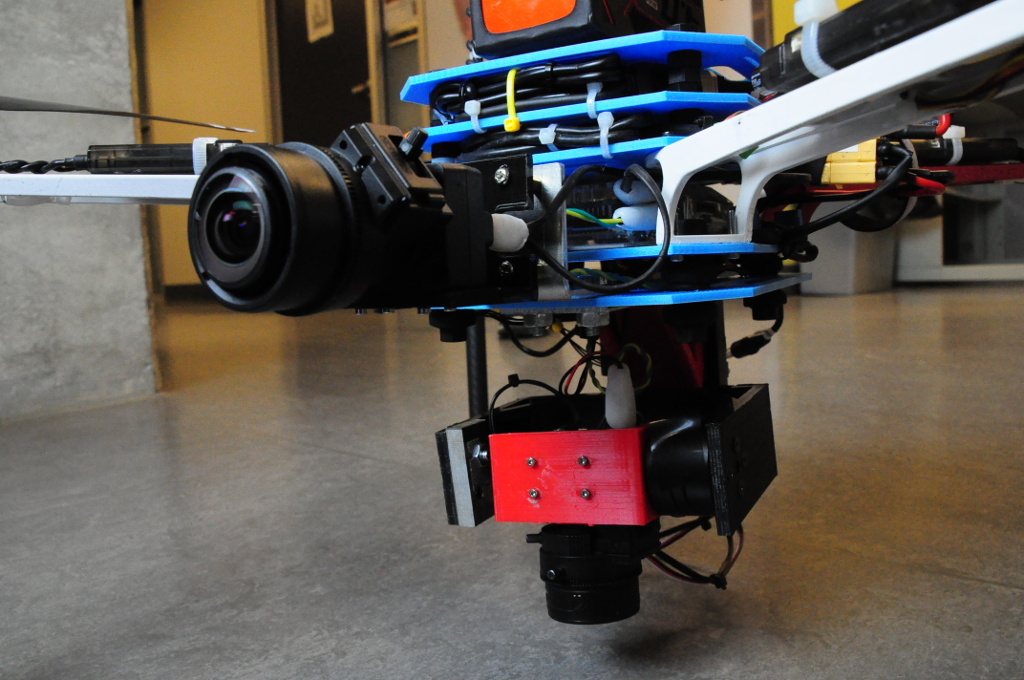
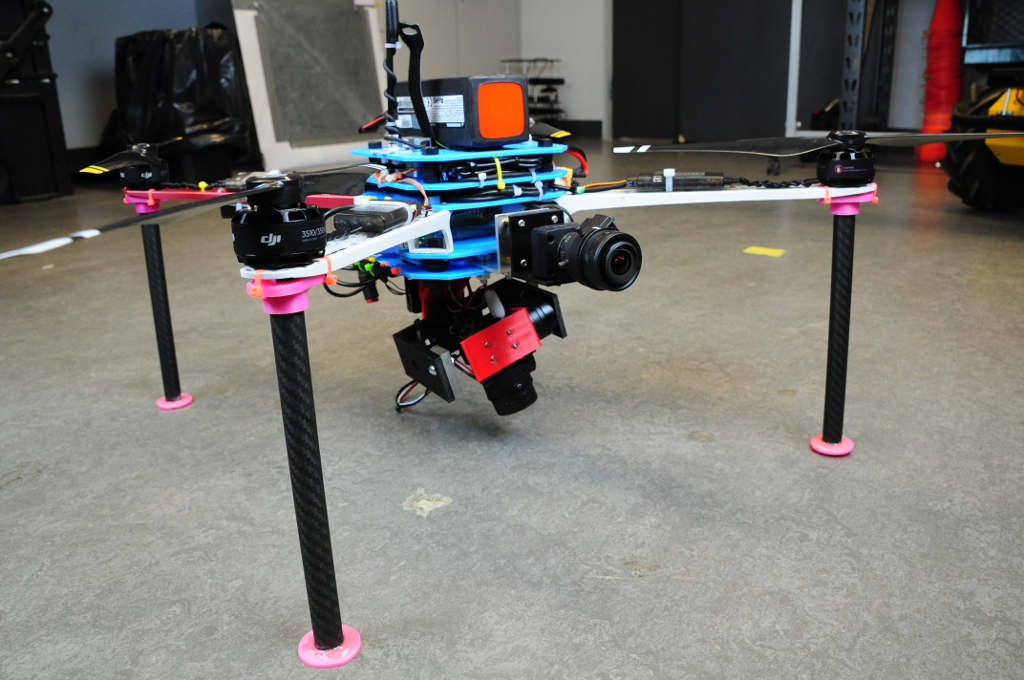
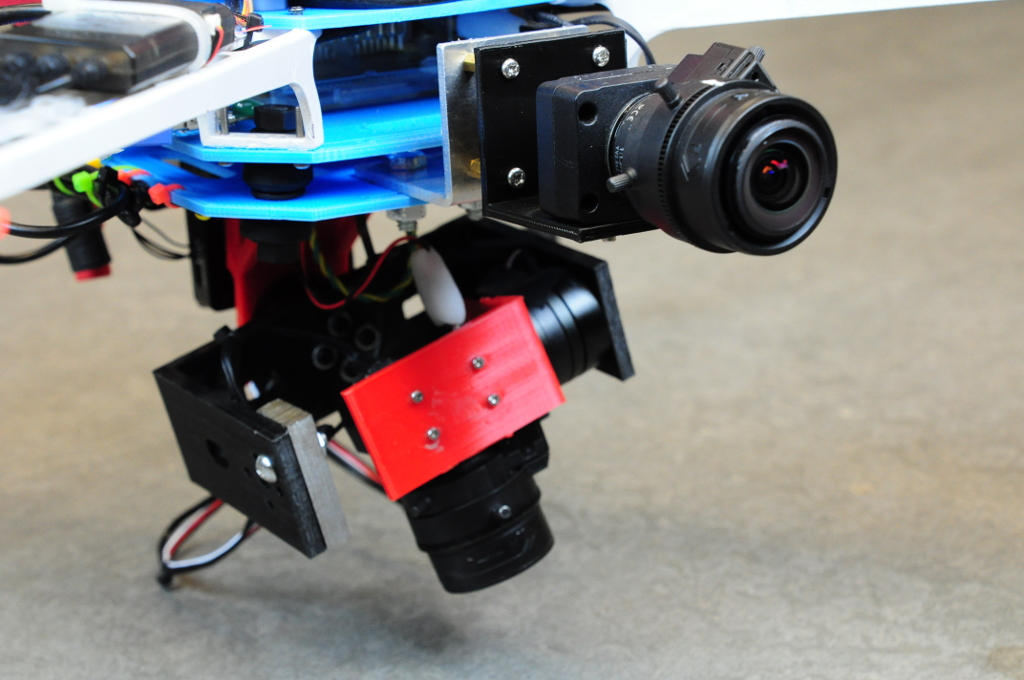
My team and I devised a novel camera to gimbal camera extrinsics calibration. In this project I designed and built a custom quadrotor with a gimbal camera using off the shelf components. The custom built quadrotor is one of a kind, (as of Nov, 2017) there is no quadrotor on the consumer market that allows the developer to control the gimbal camera and obtain live image data during flight (DJI's limted API only allows programs to access photos and video stream after flight, see here)
Quadrotors currently relies heavily on GPS but GPS is not always reliable. I explore and implemented a vision based flight stack that enables a quadrotor to track and land autonomously onto a moving vehicle all onboard the quadrotor, there is no communication between the ground vehicle and the quadrotor, the only information the quadrotor has about the ground vehicle is the fiducial marker size on the landing platform.




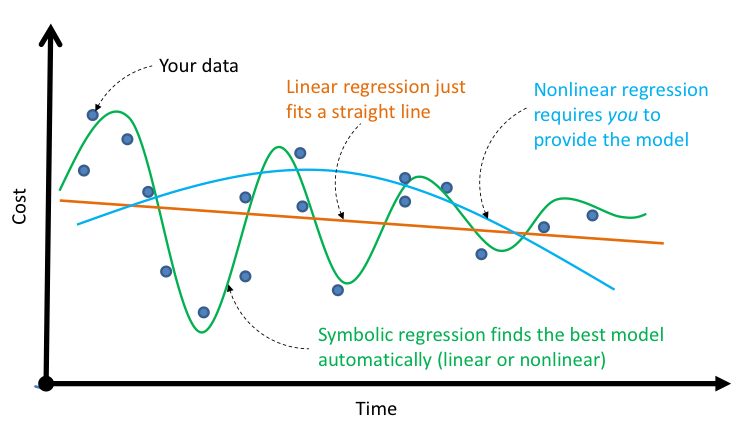
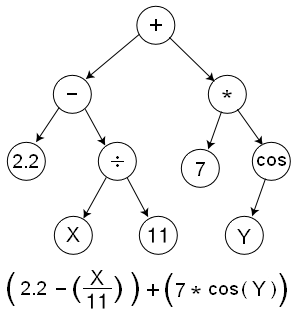
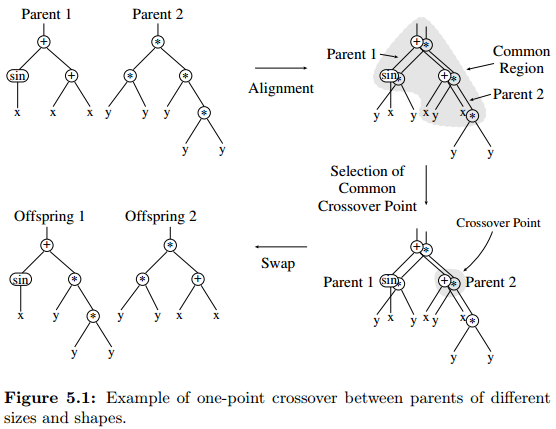
Symbolic Regression (SR) is a very special kind of regression, contrary to statistical regression where the user has to choose a model (linear or non-linear) and perform least squares to tune the model parameters, symbolic regression regresses the mathematical variables, constants and functions to best fit the data. I used Genetic Programming to solve this problem, it uses a tree data structure to represent a solution and over a number of iterations it aims to modify the solution such that the cost is minizmized.